
Episode 2: (Neural)Control
June 11 1:30-5:30 PM EDT
Panel

Dr. He (Helen) Huang
Professor, University of North Carolina & North Carolina State University

Dr. Jonathan Hurst
Professor, Oregon State University

Dr. James Finley
Associate Professor, University of Southern California
The panel will be open-ended and driven by audience questions. The panelists will provide perspectives on questions such as:
What neural/control architectures lead to strong performance characteristics for locomotion? How much feedforward/feedback?
What are important time scales for decision making in control?
What are promising approaches to achieving better-than-biology machine performance?
What is a key unsolved problem/unanswered question that you are pursuing? Why is it hard/important?
We strongly encourage attendees to add questions to this list that align with topics in (Neural)Control! Please add your questions for the panel in the form below. You may include your name/affiliation or remain anonymous.
Invited Talks

Dr. Zhaoming Xie
PhD Student, University of British Columbia
Talk title: Full Stack GPU Training and An Architecture of RL Policy with Optimization-Based Control

Dr. Amy Wu
Assistant Professor, Queen’s University
Talk title: Exoskeletons controlled by a neuromuscular model and balance strategies for gait assistance

Dr. Michael Posa
Assistant Professor, University of Pennsylvania
Talk title: Perspectives on Multi-Impact Robotics

Dr. Keith Gordon
Assistant Professor, Northwestern University
Talk title: Prior Uncertainty Impedes Locomotor Adaptation

Dr. Katherine Poggensee
PhD Graduate, Stanford University
Talk title: Optimizing the human for human-in-the-loop optimization

Dr. Dai Owaki
Associate Professor, Tohoku University
Talk title: Robotic and Biological Interlimb Coordination
Moderators

Dr. Christian Hubicki
Assistant Professor, Florida A&M University & Florida State University

Dr. Helen J. Huang
Assistant Professor, University of Central Florida

Dr. Patrick Wensing
Assistant Professor, University of Notre Dame
Poster Session
Room 1

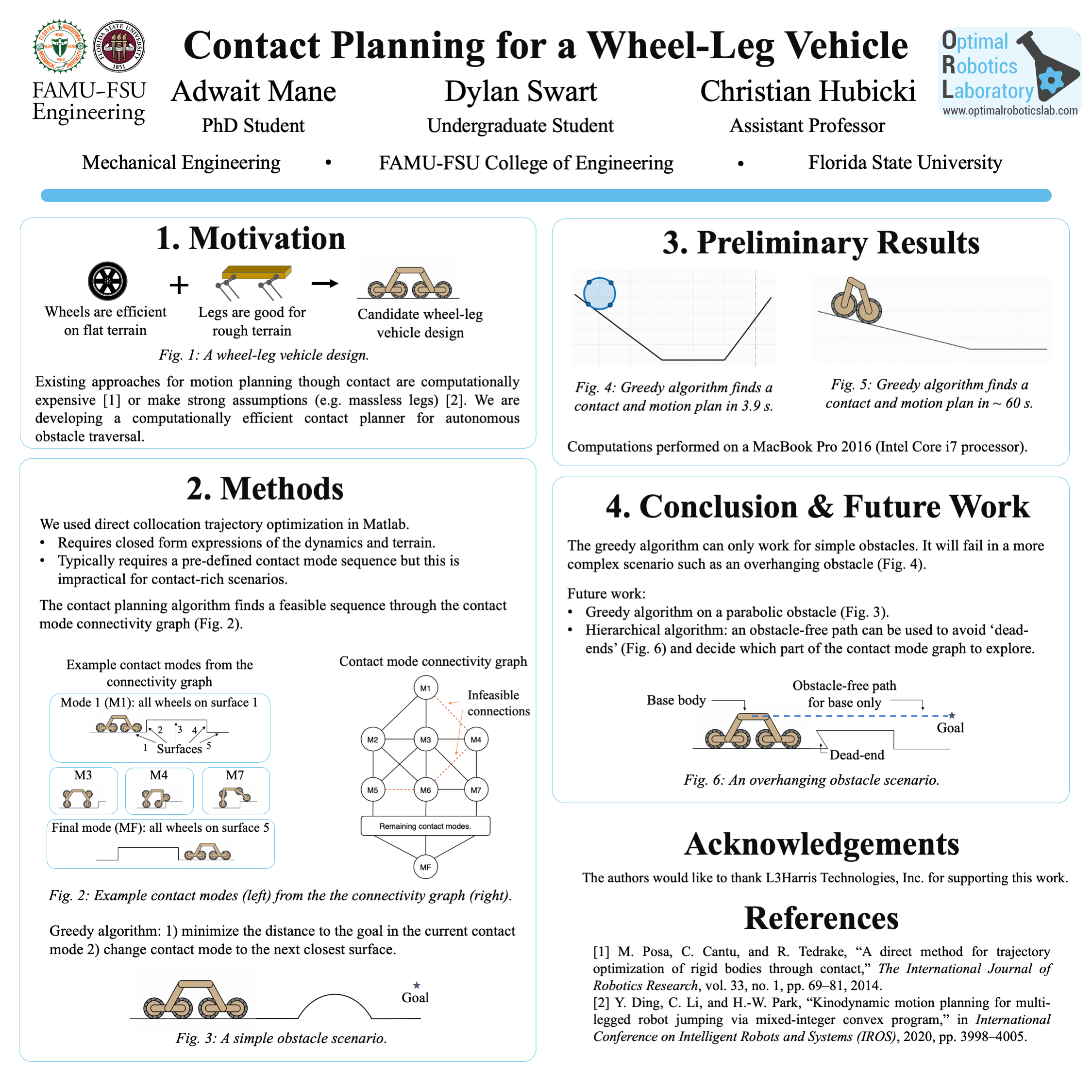
Contact Planning for a Wheel-Leg Vehicle
Adwait Mane, Dylan Swart, Christian Hubicki

Applying dynamical systems theory and minimal intervention principle to the control of leg stiffness
Alessandro Garofolini, Karen J Mickle, Patrick McLaughlin, Simon B Taylor

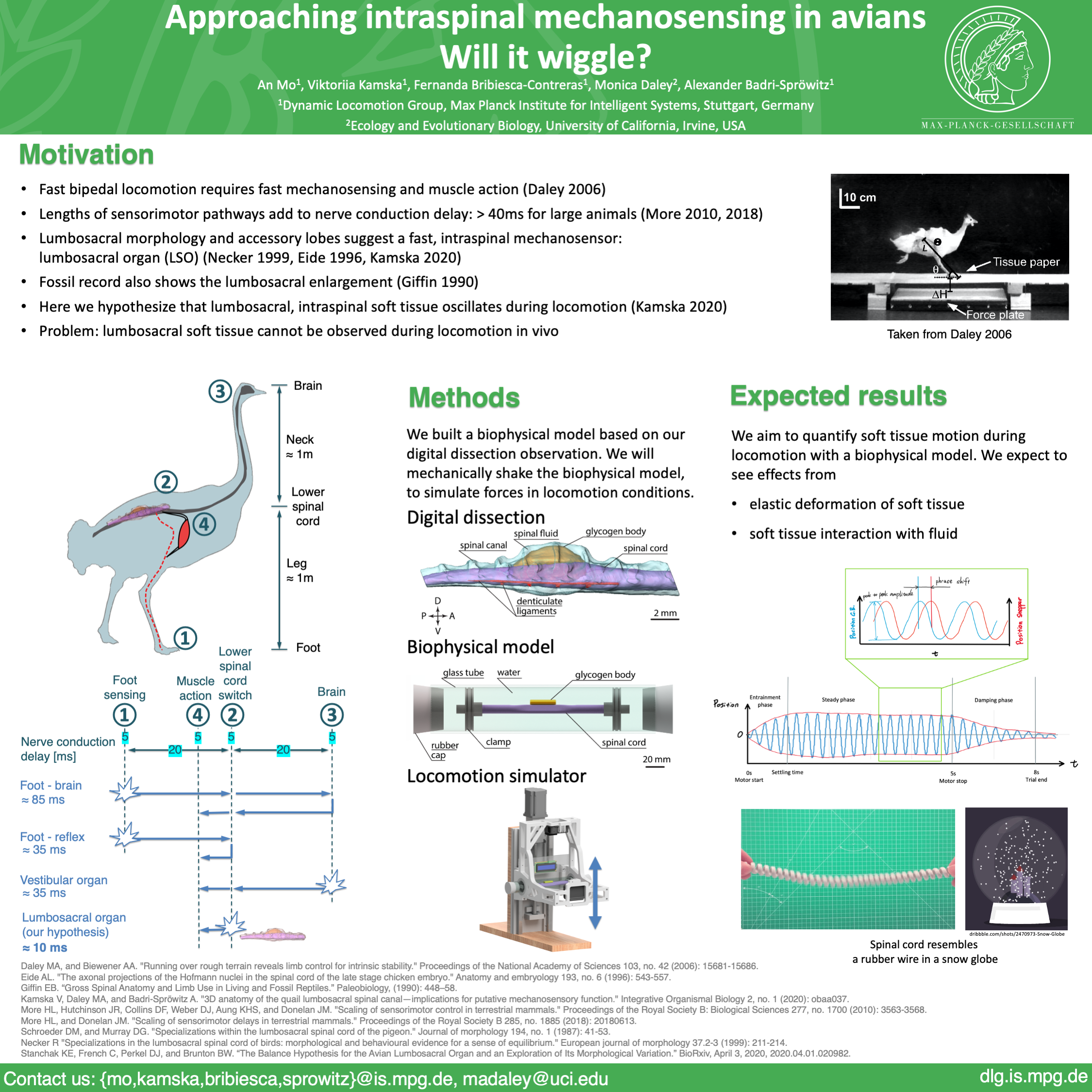
Approaching intraspinal mechanosensing in avians
An Mo, Viktoriia Kamska, Fernanda Bribiesca Contreras, Monica Daley, Alexander Badri-Sprowitz

Policy Decomposition
Ashwin Khadke, Hartmut Geyer
Room 2

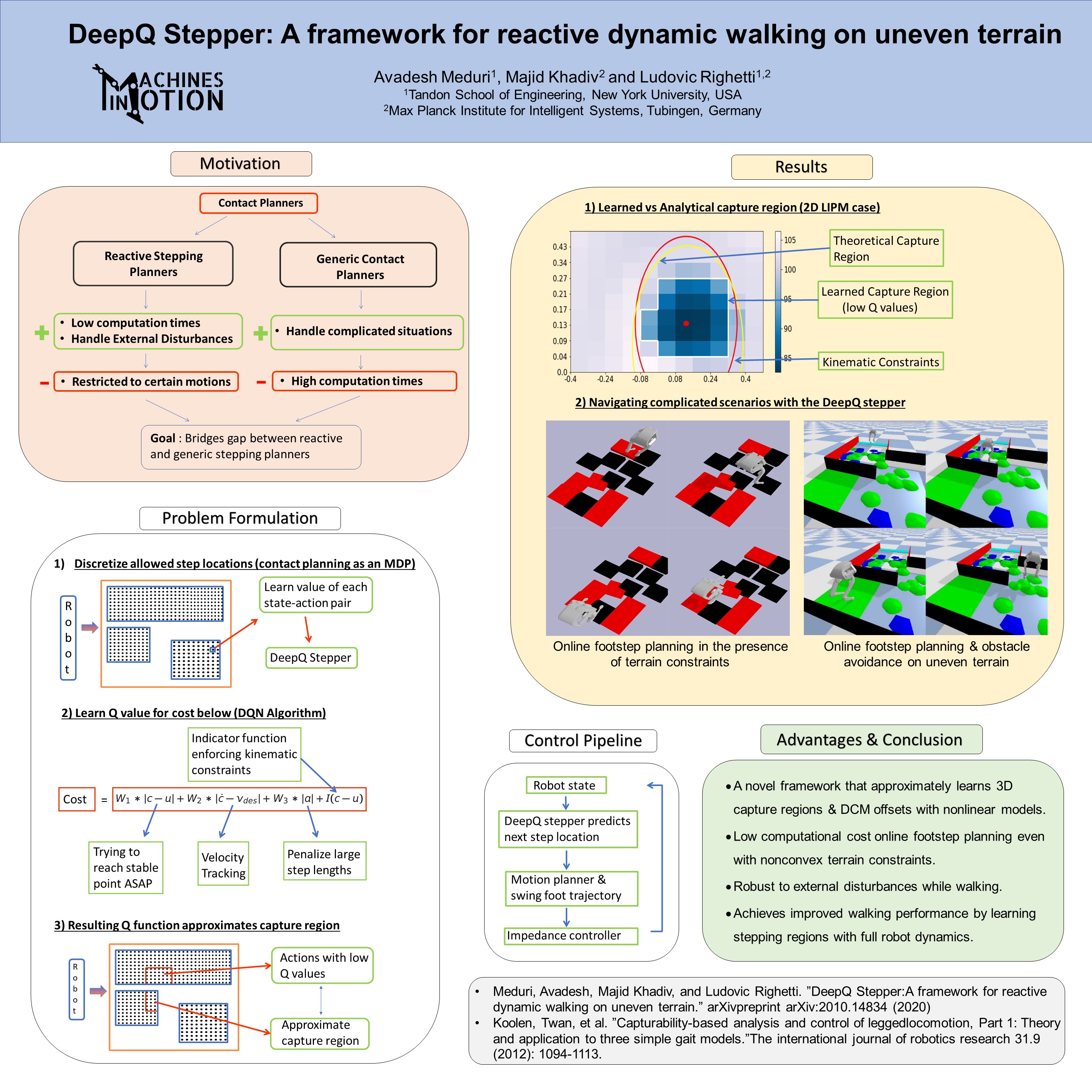
DeepQ Stepper: A framework for reactive dynamic walking on uneven terrain
Avadesh Meduri, Ludovic Righetti

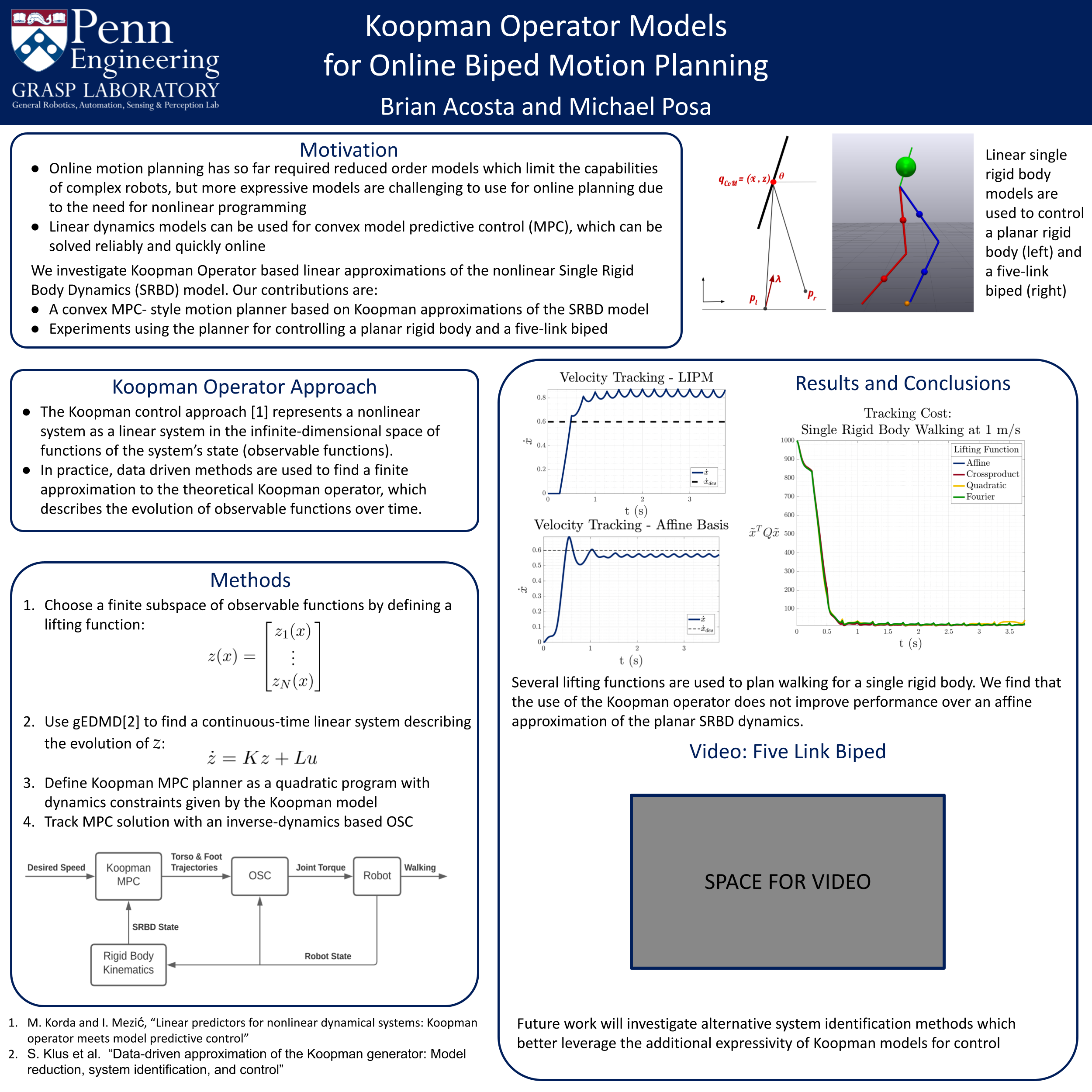
Learned Linear Models for Online Motion Planning
Brian Acosta, Michael Posa

Nonlinear Modes for Efficient Robotic Locomotion
Davide Calzolari, Cosimo Della Santina, Alin Albu-Schaffer

Predictive neuromuscular simulation of the sit-to-walk movement for two distinct initial postures
Eline van der Kruk, Thomas Geijtenbeek
Room 3

Toward Engineering Mechanical Intelligence via Scalable Co-design
Gabriel Bravo-Palacios, Patrick M. Wensing

Robust 3D Bipedal Locomotion through Reinforcement Learning and Feedback Regulation
Guillermo Castillo, Bowen Weng, Wei Zhang, Ayonga Hereid

Can we escape optimization purgatory? A study on whether people are sensitive to customized versus generalized exoskeleton assistance
Gwen Bryan, Patrick W. Franks, Seungmoon Song, Steven H. Collins

Model Hierarchy Predictive Control of Legged Locomotion
He Li, Patrick M. Wensing
Room 4

Identification of multi-muscle reflex structure in walking
Huawei Wang, Massimo Sartori

Robotic exoskeleton assistance during walking modulates cortical brain oscillations
Seongmi Song, Anna K. Mcgough, Courtney Haynes, Christian Poindexter, J. Cortney Bradford

Toward Reduced-order Modeling Approaches for Rapidly Reactive/Adaptive Locomotion
Jason White, Christian Hubicki

Pushing the Limits: Running at 3.2m/s on Cassie
Jeremy Dao, Helei Duan, Kevin Green, Jonah Siekmann, Yesh Godse, Jonathan Hurst, Alan Fern
Room 5

The FreeMoCap Project: A free-and-open-source, hardware-and-software-agnostic, research-grade, minimal-cost motion capture system and platform for decentralized scientific research, education, and training
Jonathan Matthis, Aaron Cherian, Yifan Lu, Chris Cicalo, Jackie Allex, Jakob Welner

Partition-basedStability Controller for Push Recovery
Hyunjong Song, William Z. Peng, Joo H. Kim

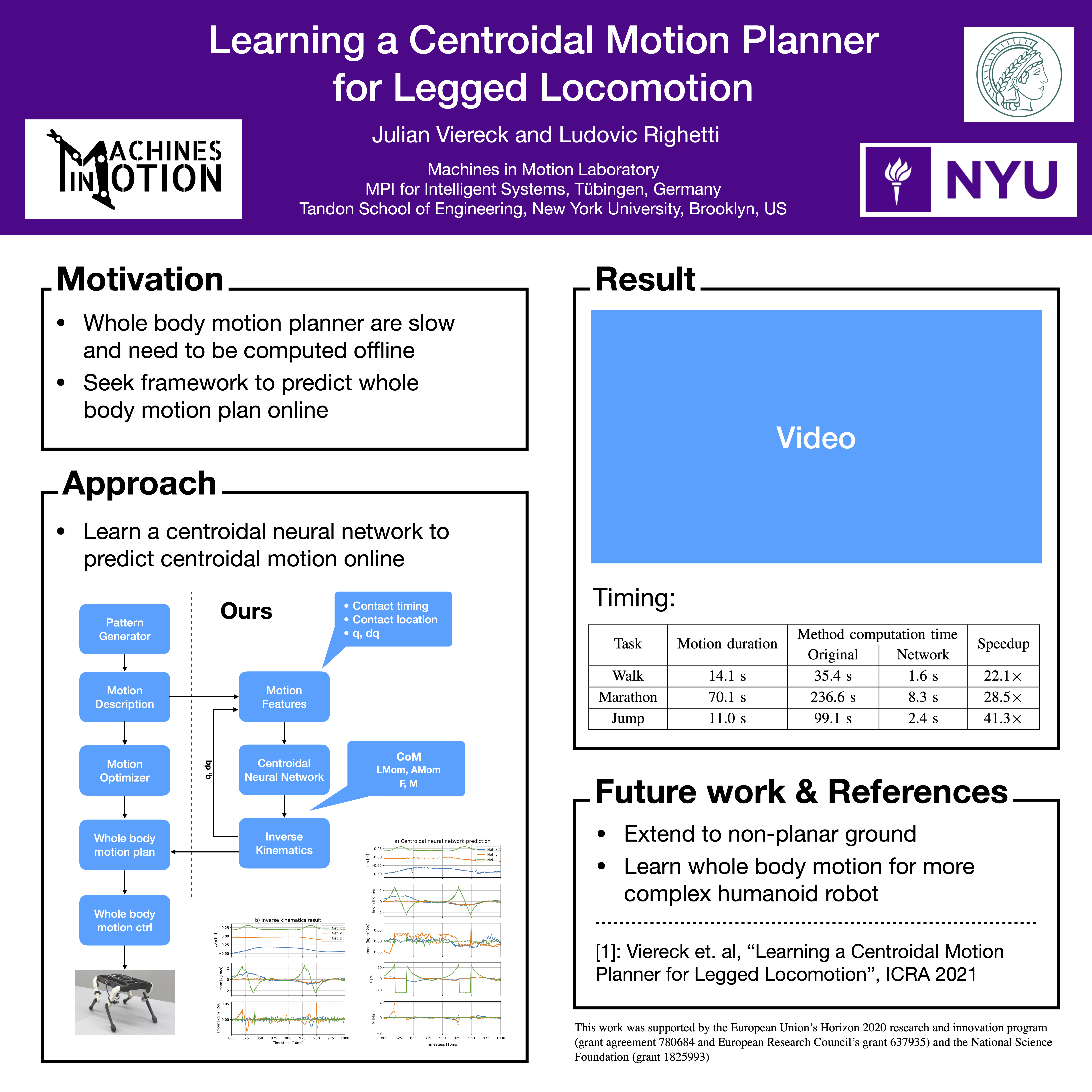
Learning a Centroidal Motion Planner for Legged Locomotion
Julian Viereck, Ludovic Righetti
Measurement and Correction of Stooped Posture during Gait Using Wearable Sensors in Patients with Parkinsonism
Keewon Kim, Se Hoon Kim, Han Gil Seo
Room 6

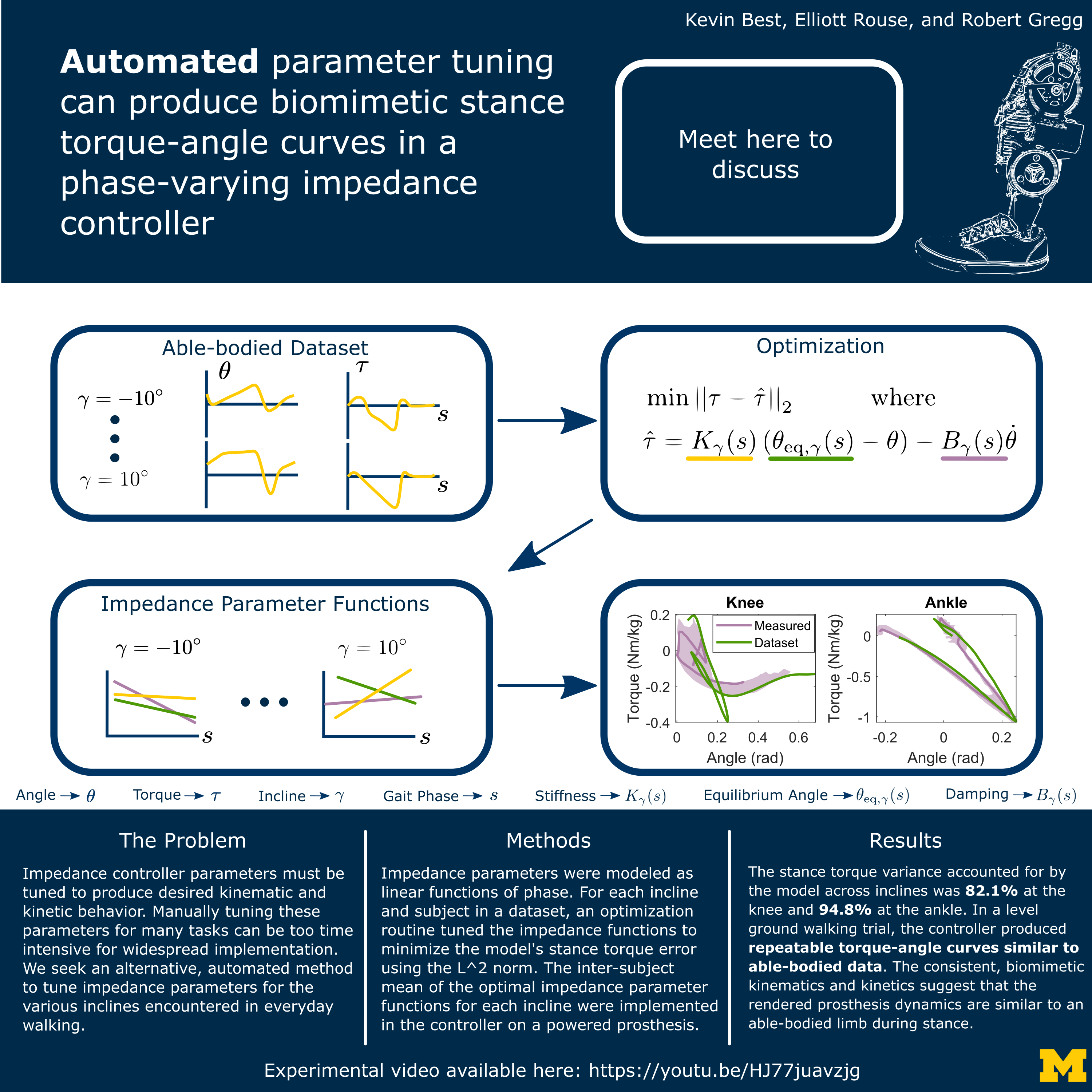
Continuous Phase-Varying Impedance Control of a Knee-Ankle Prosthesis for Incline Walking
Kevin Best, Elliott J. Rouse, and Robert D. Gregg

Preference-Based Learning for Dynamic Bipedal Locomotion
Maegan Tucker, Noel Csomay-Shanklin, Aaron D. Ames
Gait stability through ankle moment control: compensating or steering foot placement?
Moira van Leeuwen, Jaap van Dieën, Andreas Daffertshofer, Sjoerd Bruijn
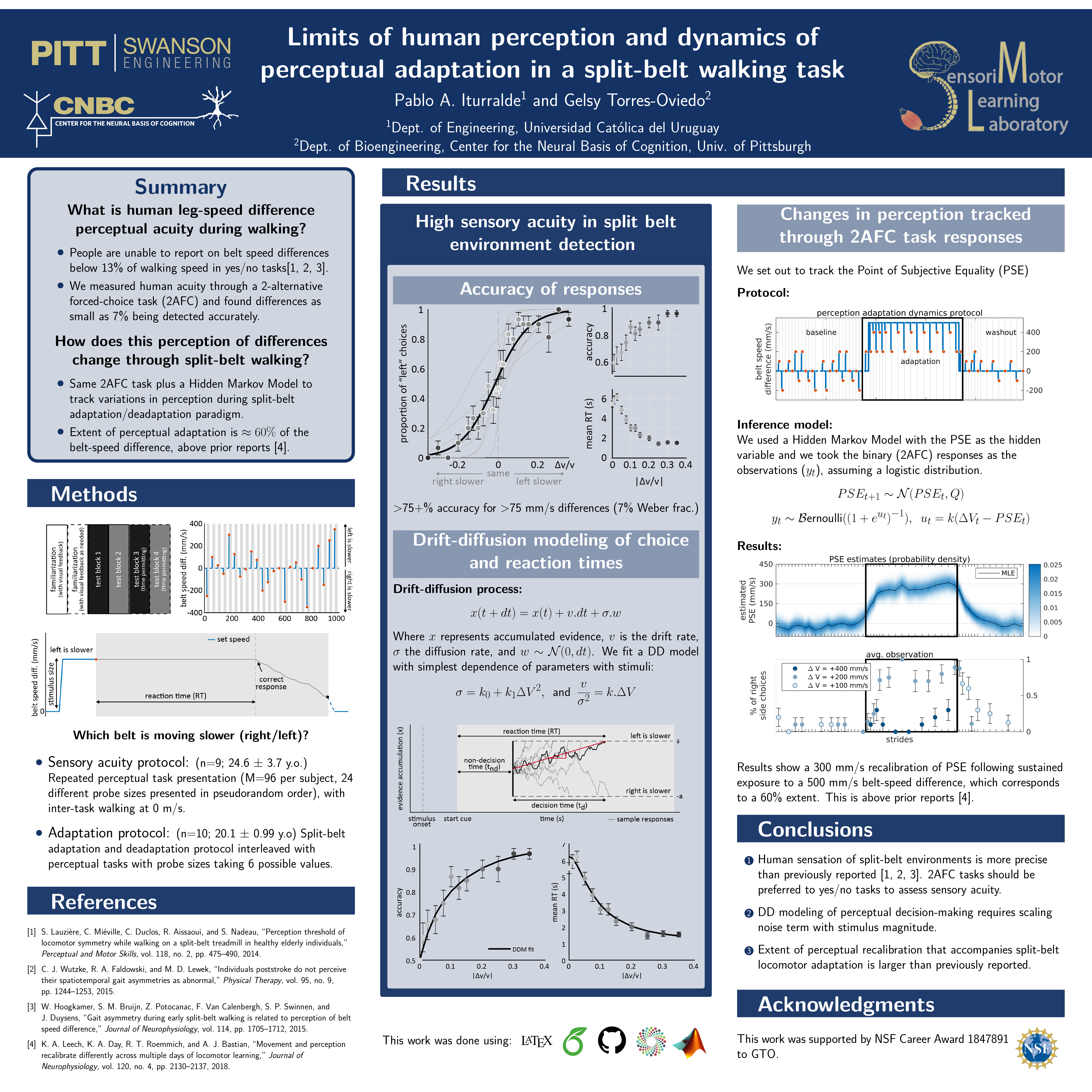
Tracking the adaptation of perceived speed asymmetry through hidden Markov models
Pablo Iturralde, Gelsy Torres-Oviedo
Room 7

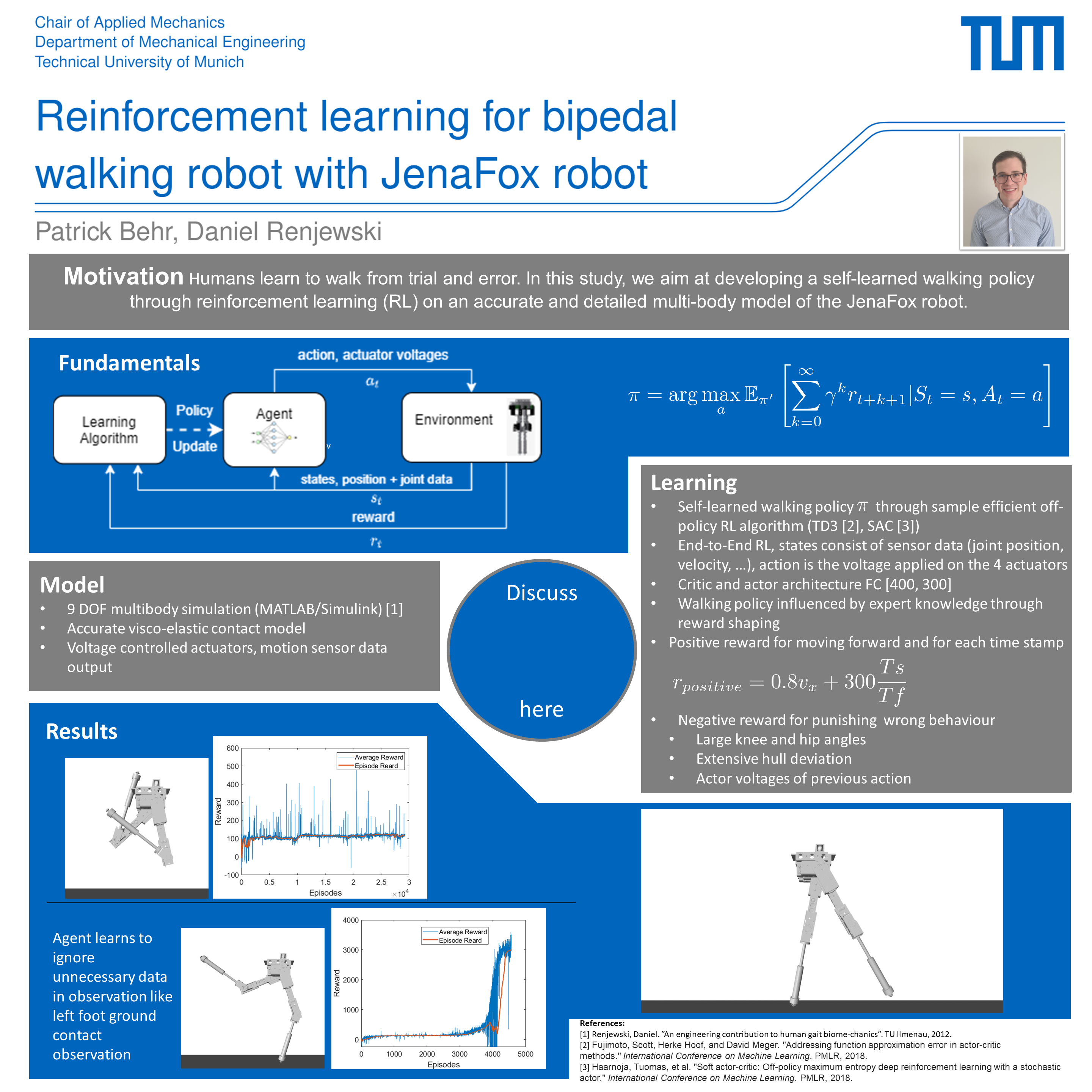
Reinforcement learning for bipedal walking robot
Patrick Behr, Daniel Renjewski

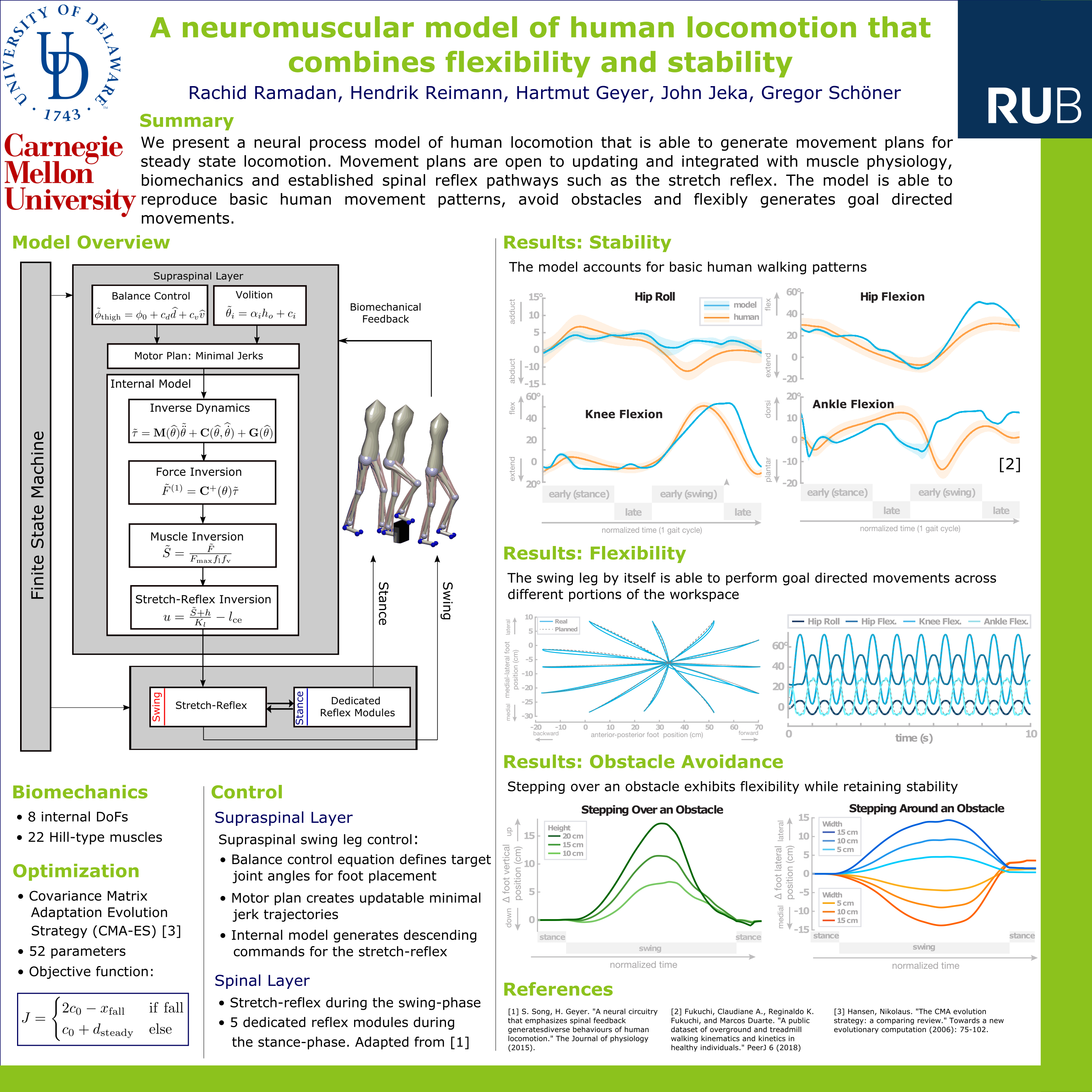
A neuromuscular model of human locomotion that combines flexibility and stability
Rachid Ramadan, Hendrik Reimann, John Jeka, Gregor Schoner

Footstep-Based Detection of Intended Gait Speed for Exoskeleton Users
Roopak Karulkar, Patrick M. Wensing

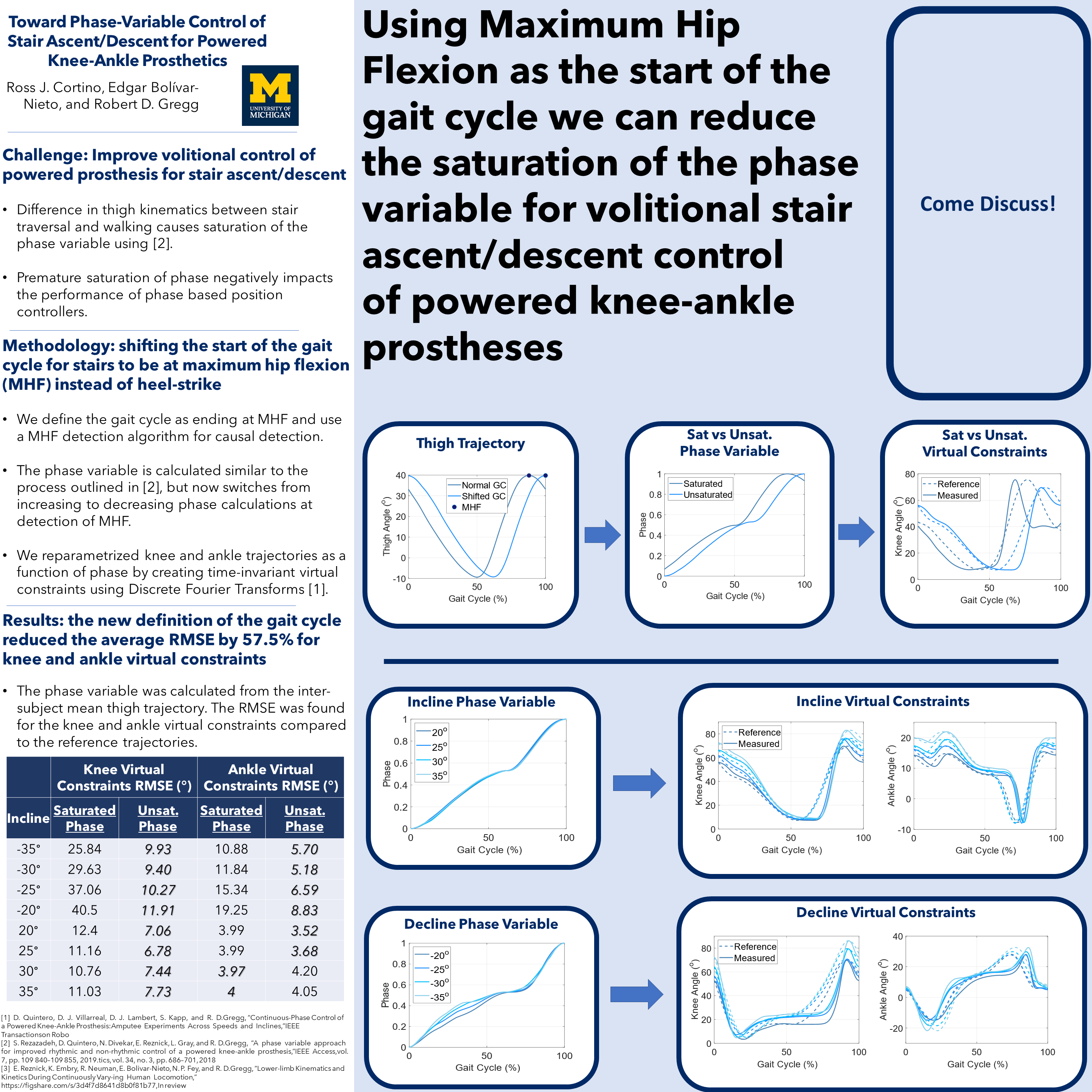
Towards Phase-Variable Control of Stair Ascent of Powered Knee-Ankle Prostheses
Ross Cortino, Edgar Boĺıvar-Nieto, and Robert D. Gregg
Room 8

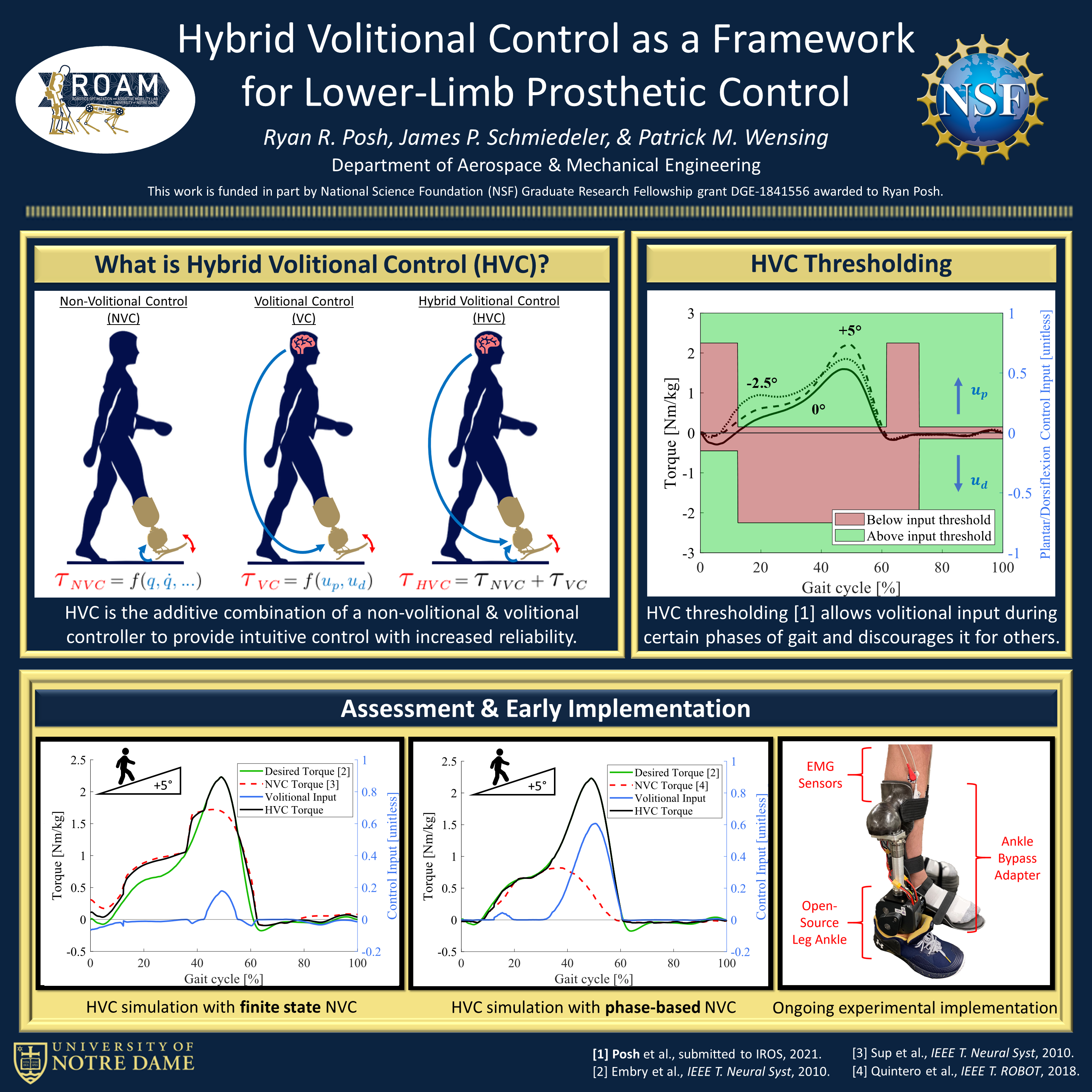
Hybrid Volitional Control as a Framework for Lower-Limb Prosthetic Control
Ryan Posh, James P. Schmiedeler, Patrick M. Wensing

Real-Time Lower-Limb Activity Recognition with Instantaneous Characteristic Features
Shihao Cheng, Edgar Boĺıvar-Nieto, Robert D. Gregg

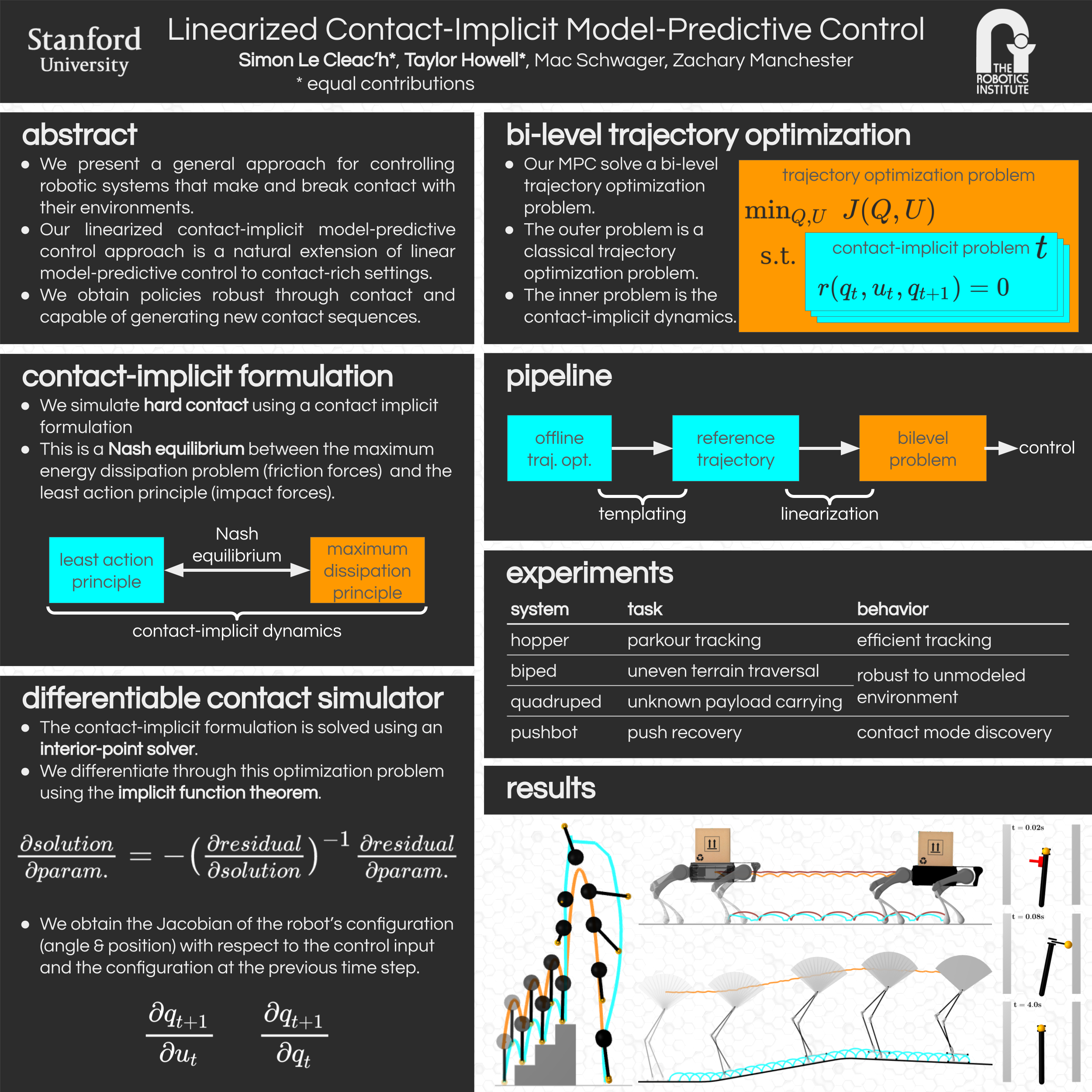
Fast Linearized Model-Predictive Control for Legged Robots
Simon Le Cleac’h, Taylor Howell, Mac Schwager, Zachary Manchester

Using machine learning to predict foot placement during walking
Sina Mehdizadeh, Andrea Iaboni, BabakTaati
Room 9

SEROW: Legged Robot State Estimation
Stylianos Piperakis, Dimitrios Kanoulas, Panos Trahanias

Spinal Reflexes can Produce Natural Bipedal Walking and Running Gaits
Thomas Geijtenbeek, Frans C.T. van der Helm

Dynamic Bipedal Locomotion with Operational Space Control and Fast Reduced-order Planning
Tianze Wang, Christian Hubicki

Interfacing Robotic Exoskeletons with Human Somatosensory Information for Walking Support
Guillaume Durandau, Herman van der Kooij, Massimo Sartori
Room 10
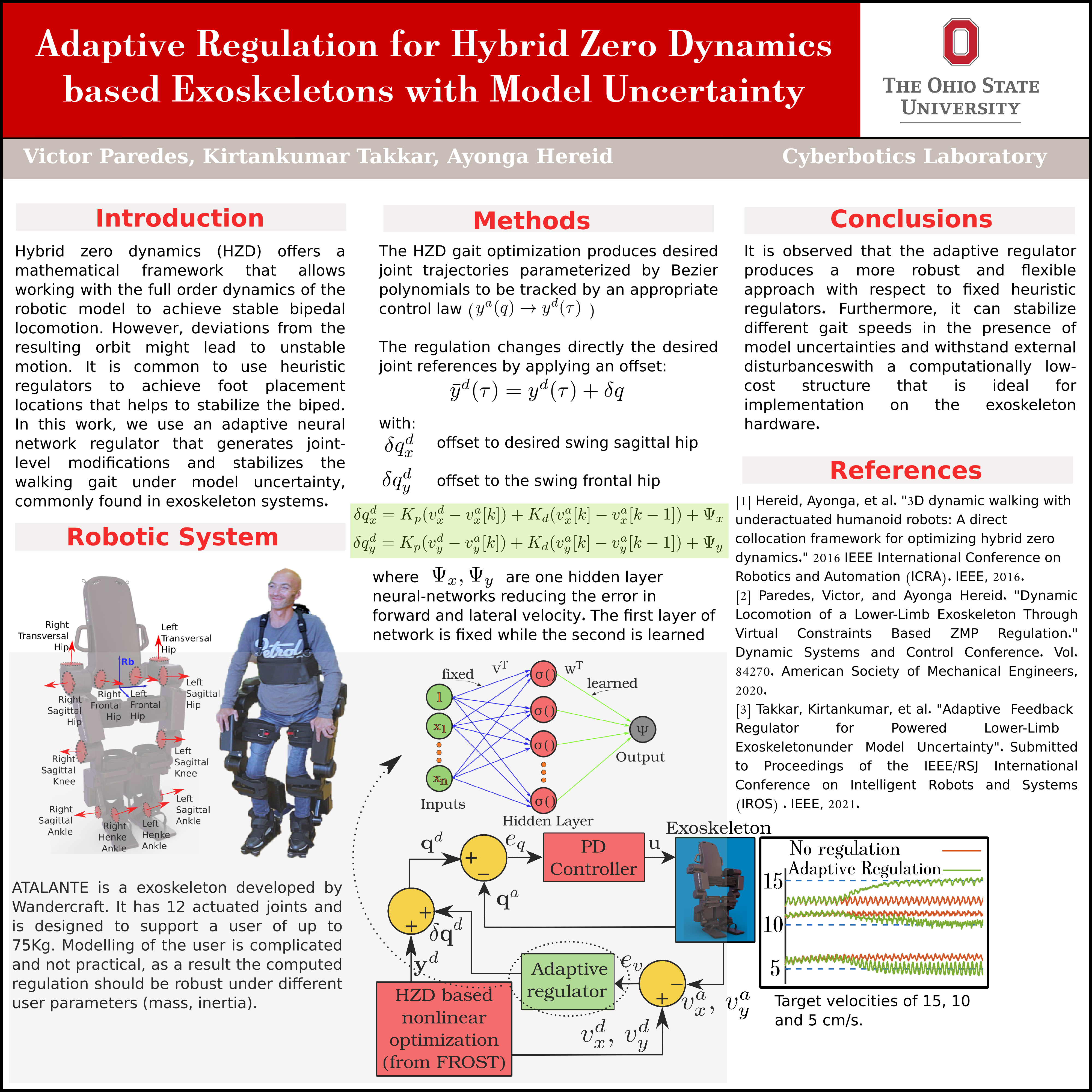
Adaptive Regulation for Hybrid Zero Dynamics based Exoskeletons with Model Uncertainty
Victor Paredes, Kirtankumar Takkar, Ayonga Hereid

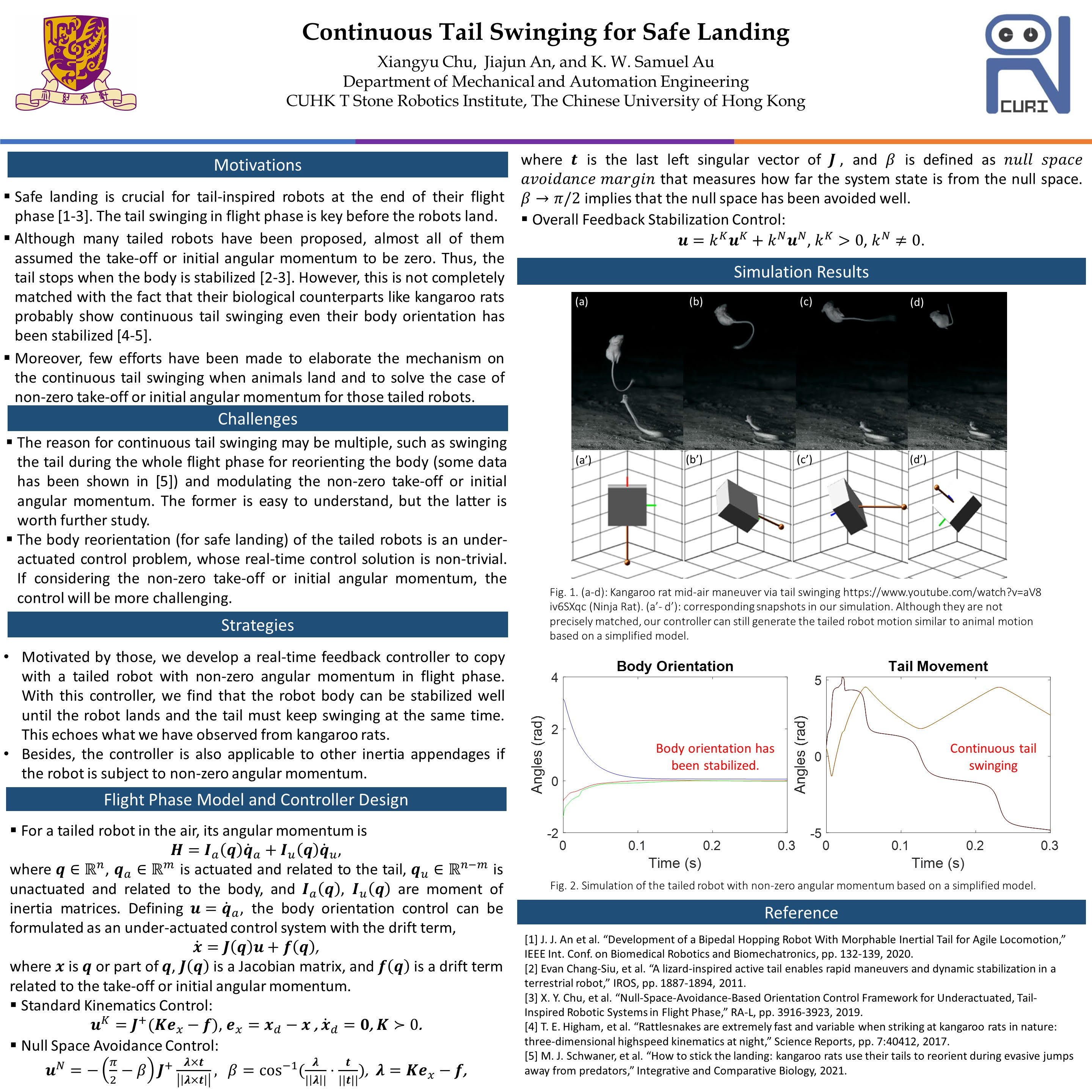
Continuous Tail Swinging for Safe Landing
Xiangyu Chu, Jiajun An, and K. W. Samuel Au

Full Stack GPU Training and An Architecture of RL Policy with Optimization-Based Control
Zhaoming Xie, Xingye Da
Room 11

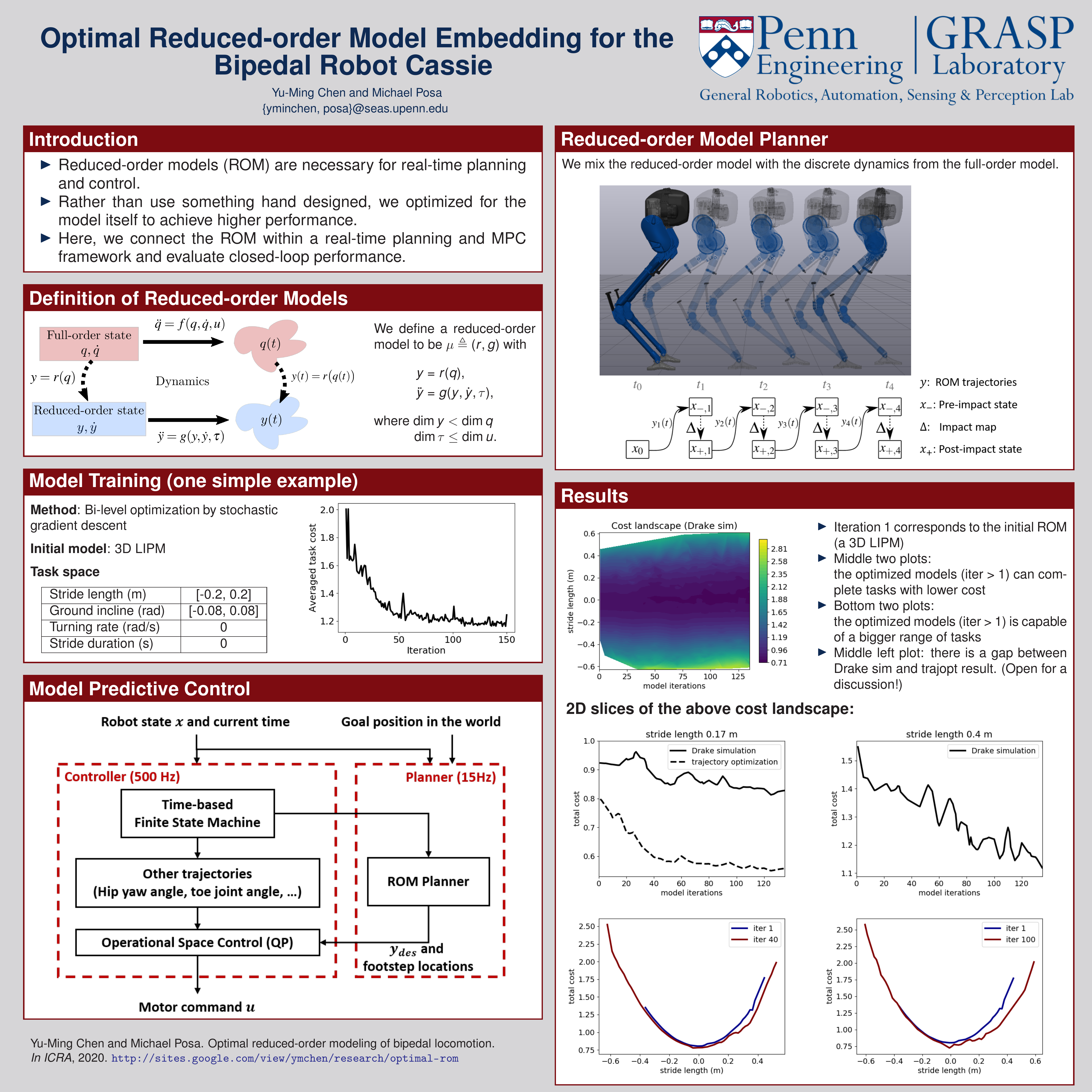
Optimal Reduced-order Model Embedding for Cassie
Yu-Ming Chen, Michael Posa
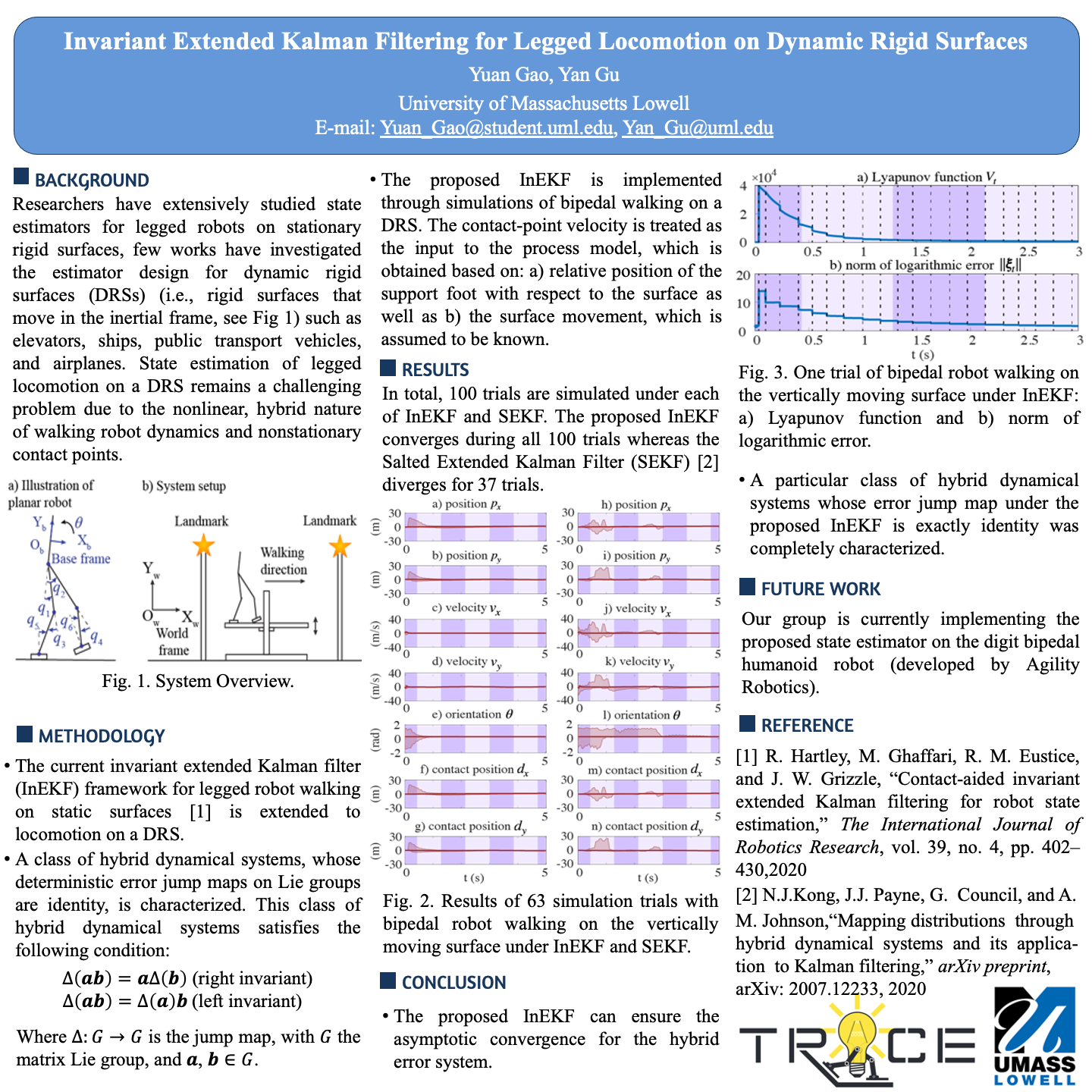
Hybrid Invariant Extended Kalman Filtering for Legged Locomotion on Dynamic Rigid Surfaces
Yuan Gao, Yan Gu

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
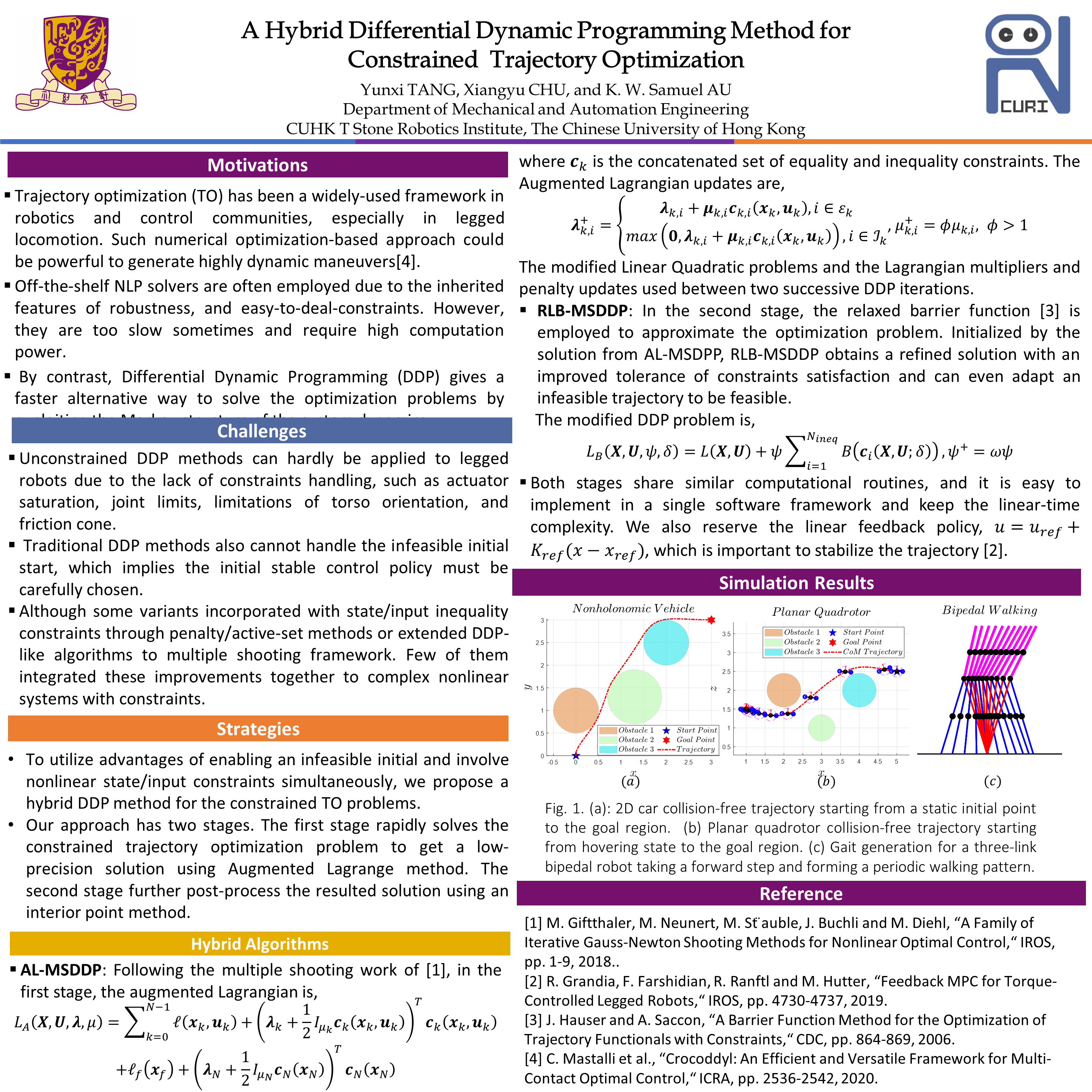
A Hybrid Differential Dynamic Programming Method for Constrained Trajectory Optimization
Yunxi Tang, Xiangyu Chu, and K. W. Samuel Au
{kind=link}