
Episode 3: (Task)Objectives
July 15 1:30-5:30 PM EDT
Panel

Dr. Young-Hui Chang
Professor, Georgia Institute of Technology

Dr. Monica Daley
Associate Professor, University of California-Irvine

Dr. Luis Sentis
Professor, University of Texas-Austin
The panel will be open-ended and driven by audience questions. The panelists will provide perspectives on questions such as:
What are the most relevant objectives and tasks for robotic and biological locomotion?
How should energy, force, and work be balanced when analyzing/synthesizing walking?
How do you get humans and assistive devices to play by the same rules? Can their objectives be different, or should they be the same?
What are promising approaches to autonomy - understanding it in biology, synthesizing it in robots?
What is a key unsolved problem/unanswered question that you are pursuing? Why is it hard/ important?
We strongly encourage attendees to add questions to this list that align with topics in (Task)Objectives! Please add your questions for the panel in the form below. You may include your name/affiliation or remain anonymous.
Ask the panel a question:
Invited Talks

Kevin Green
PhD Candidate, Oregon State University
Talk title: Physics First Reinforcement Learning for Cassie

Dr. Quan Nguyen
Assistant Professor, University of Southern California
Talk title: Toward the development of adaptive intelligence for dynamic legged robots

Dr. Aaron Young
Assistant Professor, Georgia Institute of Technology
Talk title: Deep learning for predicting user and environment state in the context of control for robotic prostheses and exoskeletons

Dr. Surabhi Simha
Postdoctoral Fellow, Emory University
Talk title: Effect of cost gradient on initiating walking adaptation

Dr. Nidhi Seethapathi
Postdoctoral Fellow, University of Pennsylvania
Talk title: A theoretical framework for locomotor learning

Dr. Jason Franz
Associate Professor, University of North Carolina & North Carolina State University
Talk title: Interplay between the neuromechanics, economy, and stability of human walking in the face of dynamic balance challenges
Moderators

Dr. Christian Hubicki
Assistant Professor, Florida A&M University & Florida State University

Dr. Natalia Sánchez
Assistant Professor, University of Southern California

Dr. Robert Gregg
Associate Professor, University of Michigan
Poster Session
Room 1

Extending Capture Point to Dynamic Rigid Surfaces
Amir Iqbal, Yan Gu
When, and to what, does human-machine coadaptation converge?
Benjamin Chasnov, Lillian J. Ratliff, Samuel A. Burden

Step responses of self-paced treadmill controllers
Cesar R. Castano, Helen J. Huang

Experimental Investigation of Passive Prosthetic Feet Designed for Multiple Walking Activities Using the Lower Leg Trajectory Error Methodology
Charlotte M. Folinus, Victor Prost, Jenny A. Kent, Matthew J. Major, Amos G. Winter
Room 2

Fall avoidance via hierarchical task-switching control of the simplest dynamic walker
Navendu S. Patil, Jonathan B. Dingwell, Joseph P. Cusumano

Adapting Stepping Regulation to Laterally Maneuver
David M. Desmet, Joseph P. Cusumano, Jonathan B. Dingwell

Regulating Lateral Stability From Step To Step
Meghan E. Kazanski, Joseph P. Cusumano, Jonathan B. Dingwell
Using electroencephalography (EEG) artifacts for human-in-the-loop optimization of gait
Jasmine Balsalobre, Jinfeng Li, Helen J. Huang
Room 3

The energetic effect of swing leg control
Jian Jin, Dinant Kistemaker, Jaap van Dieën, Andreas Daffertshofer, Sjoerd M. Bruijn

Chronic limb loading results in a remarkable economy of walking with added limb mass
Talayah A. Johnson, Kavya Katugam, Ian Dechene, Jonas Rubenson

Foot Tipping Allowance in Legged Balancing with Conditional Constraints in Optimization
William Z. Peng, Hyunjong Song, Joo H. Kim

Observations from Blind Stair Traversal on Cassie
Kevin Green, Jonah Siekmann, Helei Duan, Yesh Godse, Jeremy Dao, Alan Fern, Jonathan Hurst
Room 4
Evaluating and combining cost function criteria to predict healthy gait
Kirsten Veerkamp, Niels F.J. Waterval, Thomas Geijtenbeek, Christopher P. Carty, David G. Lloyd, Jaap Harlaar, Marjolein M. van der Krogt
Towards Data-Driven Contact Model Estimation using Inverse Optimization
Luke Drnach, Ye Zhao

Predictive Musculoskeletal and Neuromusculoskeletal Models for Dynamic Simulation of Natural, Slow, and Fast Gaits of Children
Mahdokht Ezati, John McPhee

Contact Invariant Trajectory Optimization for Dynamic Quadruped Locomotion
Matthew Chignoli, Sangbae Kim
Room 5

Legged Locomotion Models in the Aquatic Domain
Max P. Austin, Jonathan E. Clark

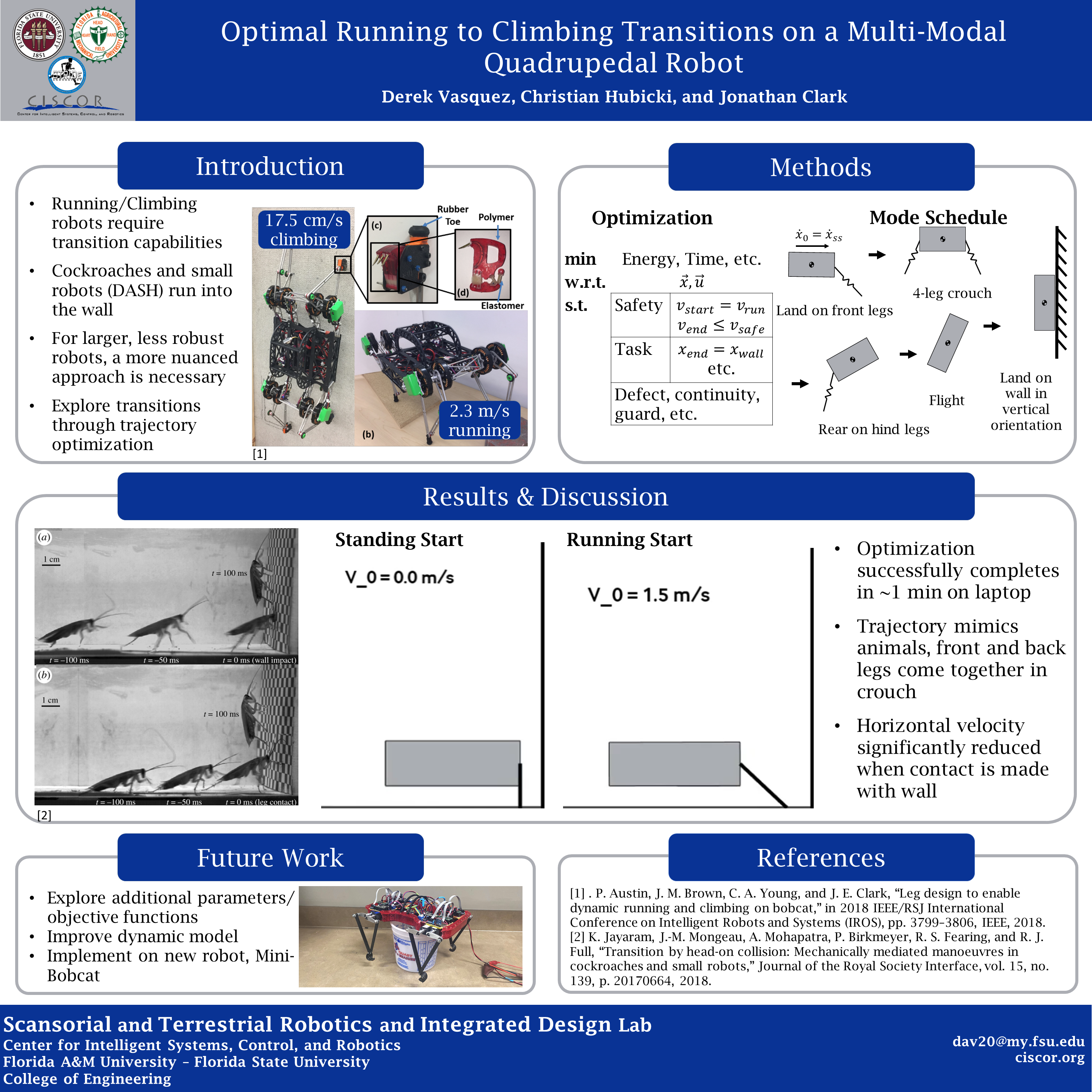
Optimal Running to Climbing Transitions on a Multi-Modal Quadrupedal Robot
Derek A. Vasquez, Christian Hubicki, Jonathan E. Clark

Tractability of Stability-Constrained Trajectory Optimization
Muhammad Saud Ul Hassan, Christian Hubicki

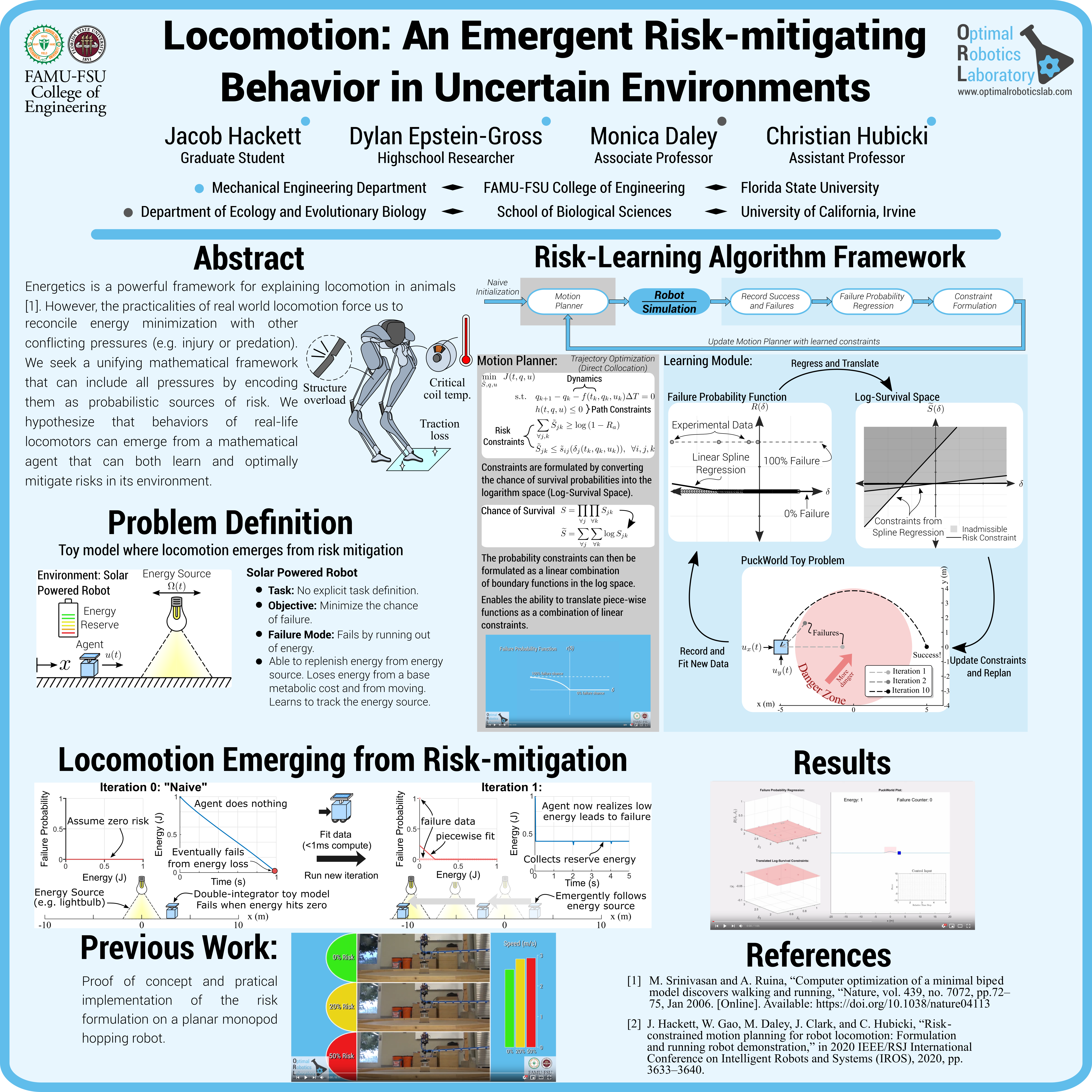
Locomotion: An Emergent Risk-mitigating Behavior in Uncertain Environments
Jacob Hackett, Dylan Epstein-Gross, Monica Daley, Christian Hubicki
Room 6

Movement Objectives in the Sit-to-Walk Task
Eline van der Kruk, Anthony Bull

Bipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
Min Dai, Xiaobin Xiong, Aaron Ames
A Step-to-Step Dynamics based Control Approach for Bipedal Robotic Walking Realization
Xiaobin Xiong, Aaron D. Ames

Constant speed gaits should work across all speeds
Nick Gravish, Dan Zhao, Glenna Clifton, Brian Bittner, Shai Revzen
Room 7

Whole-leg exoskeleton assistance halves the metabolic cost of walking on inclines
Patrick W. Franks, Gwendolyn M. Bryan, Ricardo Reyes, Steven H. Collins

Measuring the Just Noticeable Difference of Metabolic Rate with Exoskeleton Assistance
Roberto Leo Medrano, Gray Cortright Thomas, Elliott J. Rouse

Identifying the best two-joint combination of hip, knee, and ankle exoskeleton assistance
Russell M. Martin, Patrick W. Franks, Gwendolyn M. Bryan, Ava C. Lakmazaheri, Steven H. Collins

A simple model of energy cost for running on slopes
Ryan T. Schroeder, Arthur D. Kuo
Room 8

Optimal Footstep Locations and Forces During Locomotion with Bilinear Alternation
Charles Khazoom, Se Hwan Jeon, Sangbae Kim

Reactive velocity control increases energy efficiency of jumping on granular media
Sonia Roberts, Daniel E. Koditschek
Exploring the structure of bipedal asymmetrical gaits using a template model
Jiayu Ding, Zhenyu Gan

Sliding Cone Control for Hopping on Rough Terrain
C. H. David Lo, Wee Shen Ng, K. W. Samuel Au
Room 9
Insects adjust body and appendages to traverse cluttered obstacles
Yaqing Wang, Ratan Othayoth, Chen Li

Hey Everyone, We’ve Solved Bipedal Locomotion*
Yesh Godse, Jonah Siekmann, Helei Duan, Jeremy Dao, Kevin Green, Jonathan Hurst, Alan Fern

GLiDE: Generalizable Quadrupedal Locomotion in Diverse Environments with a Centroidal Model
Zhaoming Xie, Xingye Da, Buck Babich, Animesh Garg, Michiel van de Panne

Planning for Crossed-Leg Disturbance Rejection
Zhaoyuan Gu, Nathan Boyd, and Ye Zhao
Room 10

Can Chance-Constrained Contact Uncertainty Quantification Improve Feasibility of Robust Trajectory Optimization?
John Z. Zhang, Luke Drnach, and Ye Zhao

Momentum-Aware Planning Synthesis for Dynamic Legged Locomotion
Ziyi Zhou, Bruce Wingo, Nathan Boyd, Seth Hutchinson, Ye Zhao

New simulation methods estimate metabolic cost of gait phases, but how consistent are those estimations?
Arash Mohammadzadeh Gonabadi, Prokopios Antonellis, Philippe Malcolm
Navigation in Dynamic Workspaces Integrated Task and Motion Planning
Abdulaziz Shamsah,Jonas Warnke, Zhaoyuan Gu, Ye Zhao
Room 11

Predicting Human Bouncing Behaviors with Reduced-order Models and Simple Objectives
Zachary Mercer, Christian Hubicki

Does Achilles tendon stiffness determine elastic ankle exoskeleton stiffness?
Lindsey Trejo, Gregory Sawicki

{kind=link}
{kind=link}
Effects of perturbation timing on step placement predictability using a linear model
Jennifer K. Leestma, Courtney R. Smith, Gregory S. Sawicki, Aaron J. Young
Humanoid Walking with Real Perception
Duncan Calvert, Bhavyansh Mishra, Stephen McCrory, Sylvain Bertrand, Robert Griffin, Jerry Pratt